REPORT SAMPLES & RESULTS
报告样例与实测结果摘录
以下数据均来自相同测试设备(双目相机 + IMU)在可比条件下的实测标定报告
30×+
整体效率提升
弘澧系统 ≤20 秒完成全流程,Kalibr 通常需要数分钟至数十分钟,整体效率提升约 30 倍以上
2.5–3×
整体精度提升
在相同测试条件下,弘澧系统重投影误差整体低于 Kalibr 约 2.5–3 倍,标定结果更稳定可靠
Kalibr 开源方案(对比参考)
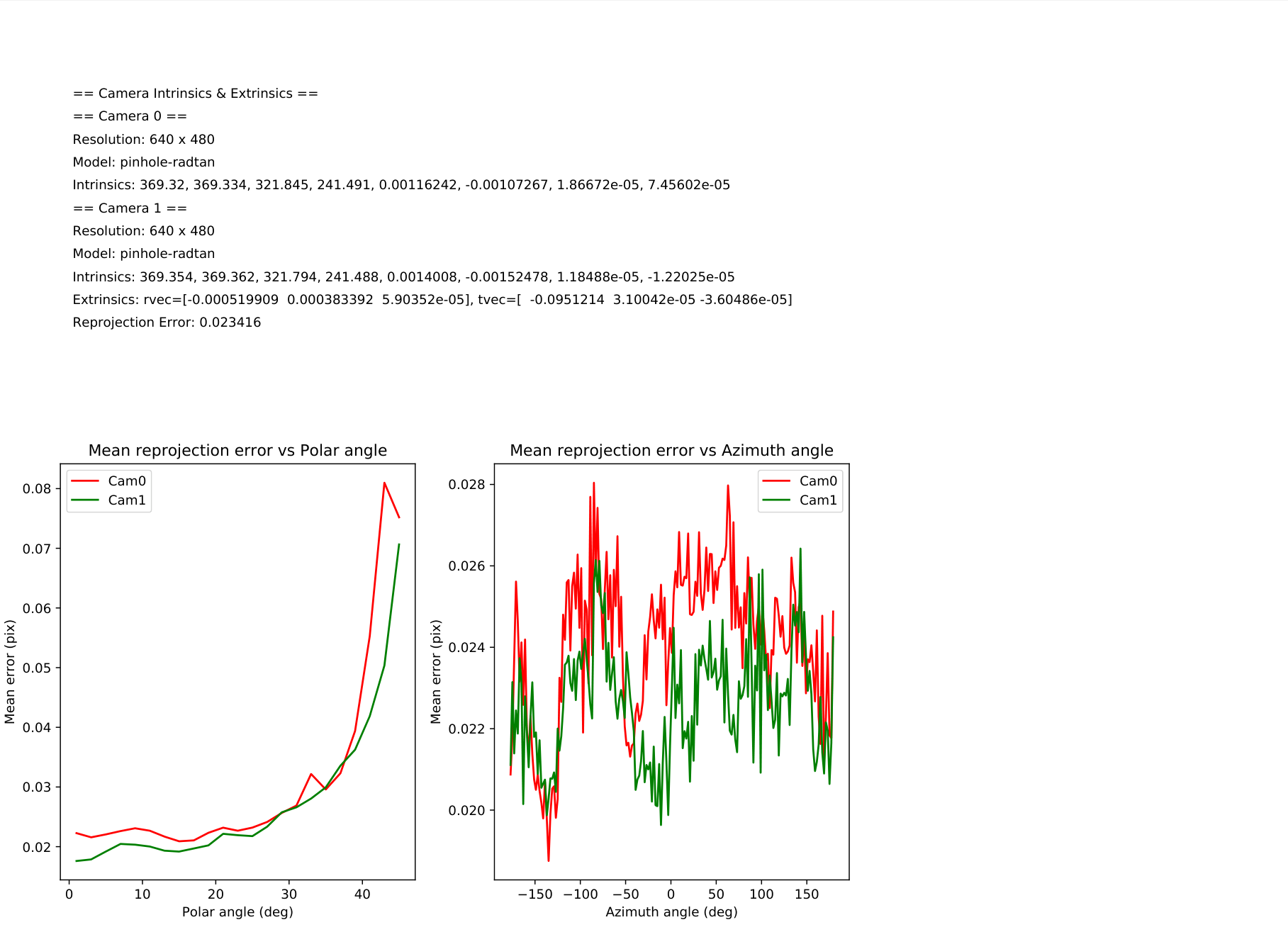
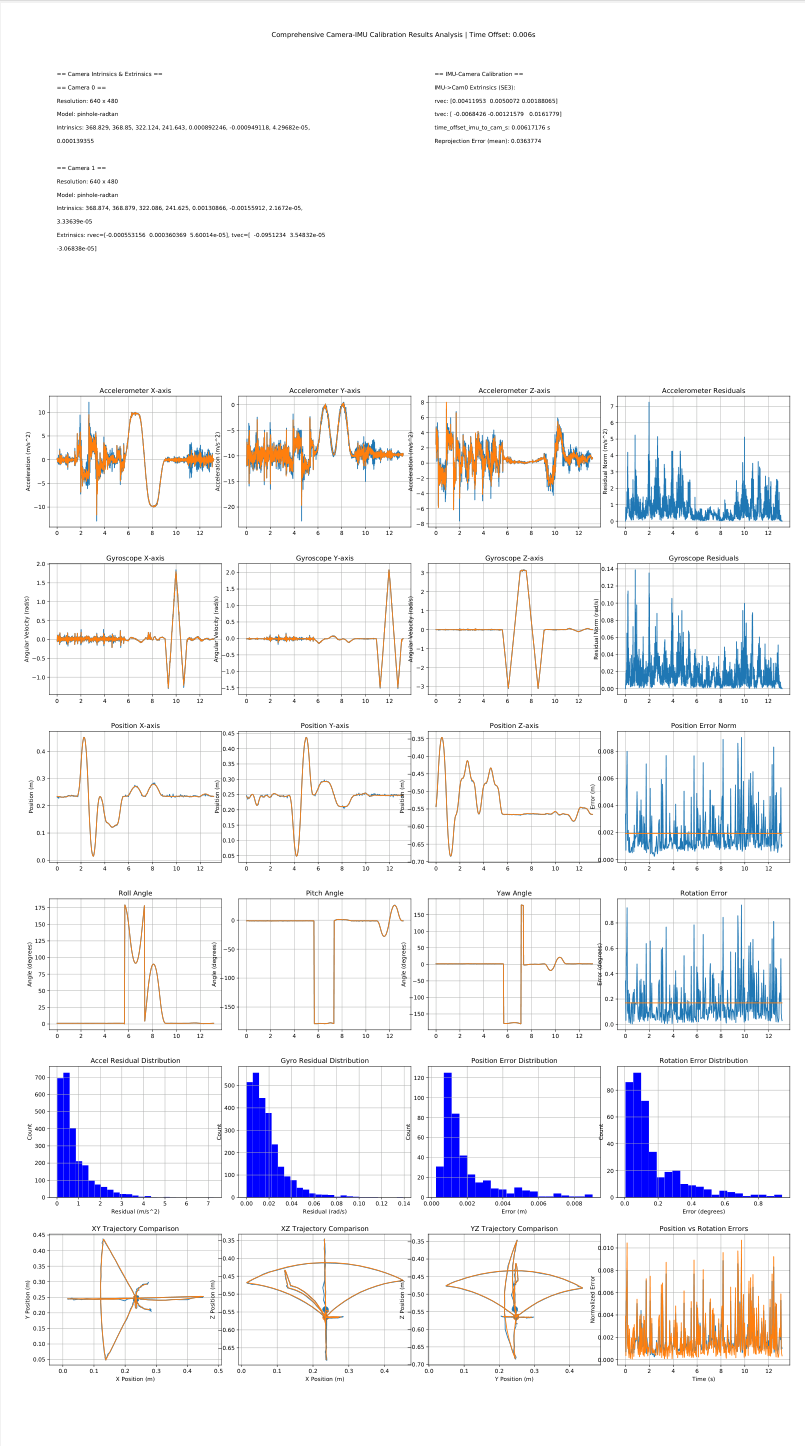
弘澧自动标定系统(实测结果)
📷 相机标定报告
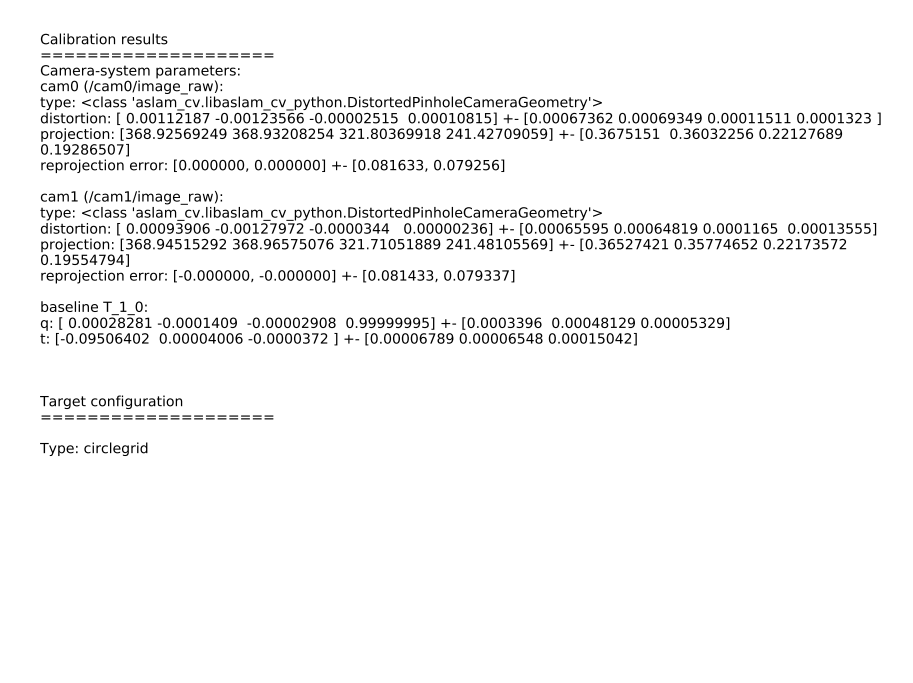
| 指标 | cam0 | cam1 |
|---|---|---|
| 重投影误差 X(std) | ±0.0816 px | ±0.0814 px |
| 重投影误差 Y(std) | ±0.0793 px | ±0.0793 px |
| 分辨率 | 640 × 480 | |
| 标定方案 | Kalibr 圆点阵列 | |
| 指标 | 数值 |
|---|---|
| 双目相机重投影误差 | 0.0234 px |
| 焦距 fx(均值) | ~369.3 |
| 分辨率 | 640 × 480 |
| 标定模型 | Pinhole-Radtan |
🔄 IMU-相机标定报告
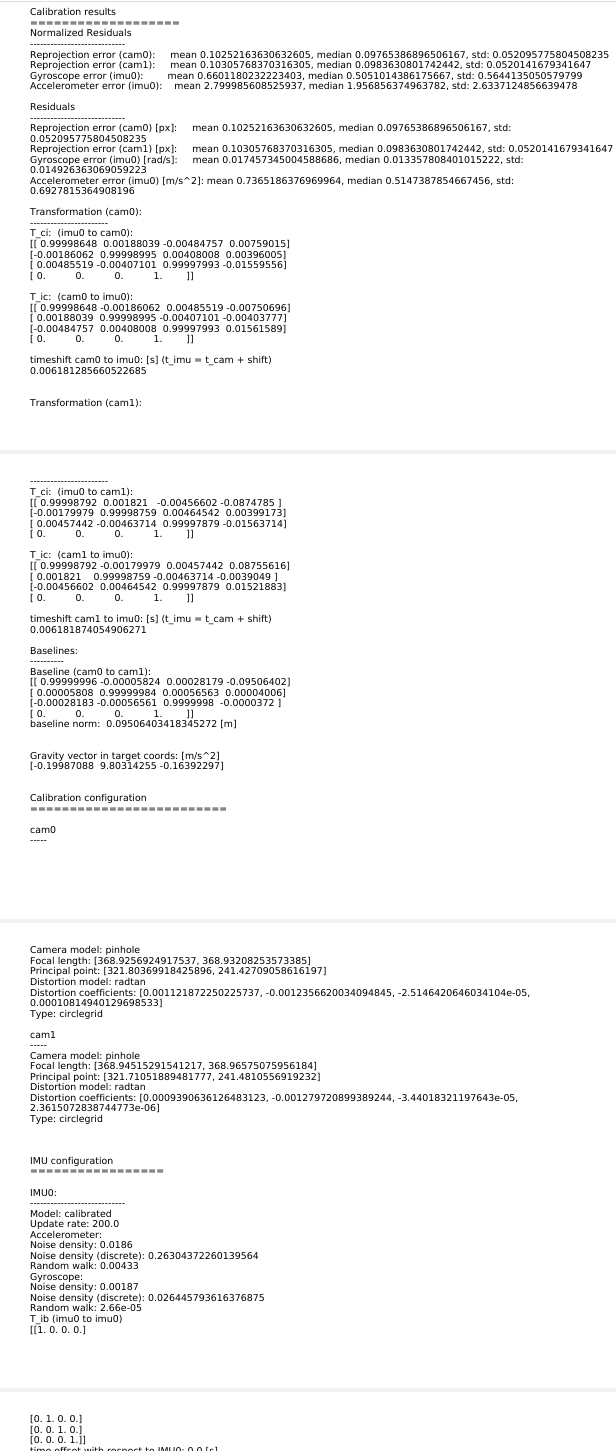
| 指标 | cam0 | cam1 |
|---|---|---|
| 重投影误差(mean) | 0.1025 px | 0.1031 px |
| 重投影误差(median) | 0.0977 px | 0.0984 px |
| 重投影误差(std) | 0.0521 px | 0.0520 px |
| 陀螺仪误差(mean) | 0.6601 rad/s | |
| 加速度计误差(mean) | 2.7999 m/s² | |
| 指标 | 数值 |
|---|---|
| 重投影误差(mean) | 0.0364 px |
| IMU-Cam 时间偏移 | 0.00617 秒 |
| 标定方法 | 弘澧自研联合优化算法 |
| 输出可视化图表 | 16+ 项残差与轨迹图 |
